Publication
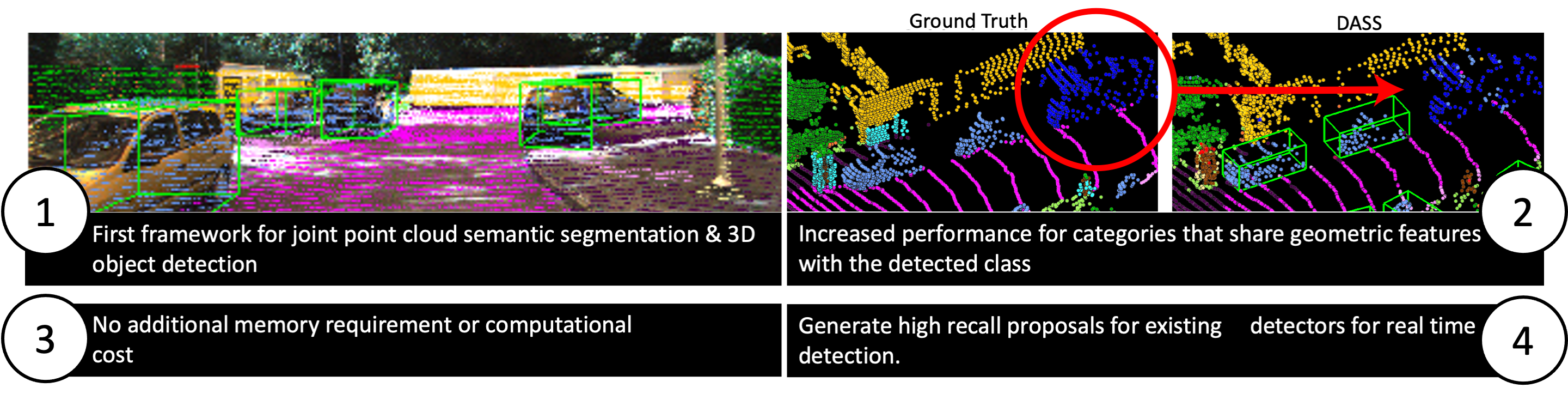
"Improving Point Cloud Semantic Segmentation by Learning 3D Object Detection"
Ozan Unal, Luc Van Gool and Dengxin Dai
Accepted at IEEE Winter Conference on Applications of Computer Vision (WACV), 2021.
[Paper]
[Arxiv]
[BibTex]
